
PART 2 OF 3 HERE
As explained back in Part 1, the speaker is intended only to be operated in active mode with a Linn Exakt system. So a bit of an explanation of Exakt first.
In a traditional hifi system, an amplifier feeds a full range signal to the back of the speaker cabinet, then a passive electrical system inside the cabinet (the crossover) splits the signal into the correct frequency ranges for each of the drive units to handle. This crossover is made of high power components which sap power from the signal, have wide tolerances and introduce their own problems such as phase errors.
In Linn Exakt, the full range signal from a digital source is fed to a component called an Exaktbox. In here the signal is split into the frequency range appropriate to each driver in the digital domain - this means it is done far more accurately than can be achieved in the speaker's own passive analogue crossover. The Exakt system allocates a DAC (digital to analogue converter) to each speaker driver and then the signal is passed to a power amplifer for each driver. This is then connected directly to the appopriate driver in the speaker cabinet without any further components getting in the way, so the amp has better control over the movement of the driver.
So Exakt has very precise control over what gets to each driver and it introduces no phase errors of its own. In addition to this, the system corrects for any phase errors within each driver and any frequency response "features" of the driver by applying an opposite signal to the error. Finally it also introduces time delays to drivers that are closer to the listener, in order to better time align the sound getting to the listener's ears. Some information here plus if you Google Linn Exakt you'll get lots more information and opinion.
Personally, I call it Linn Lessinexakt, but I don't suppose that would go down well in the marketing department...
Digital Design
As a consequency of the Linn Exakt approach, the Exaktbox system can be programmed to address pretty much any loudspeaker available, as long as there is someone who can measure the speakers and then carry out the design work to be loaded to the Exaktbox. This is the service I offer under the SpeakerFilters brand.
There are several stages involved in creating the filters:
- Physical measurement of the speakers which are then uploaded to Linn's database
- Acoustic measurement of the passive speaker prior to modification to get a view on its existing characteristics (not part of this design work as there's no existing passive design to measure)
- Electrical measurement of the speaker drive units (in and out of the cabinet if a ported design)
- Translation of the electrical measurements into the parameters expected by the Linn Exakt Design system
- Creation of initial crossover points and slopes, along with approximate attenuation of individual drivers - usually based on the passive crossover design
- Acoustic measurement and listening with lots of experimentation to get the right mix of measured results and the best listening experience - this is the most time consuming with lots of iterations
Electrical Measurements
These are based on pretty straightforward impedance sweeps - showing the impedance in relation to the input frequency range from 20Hz to 20kHz - the generally accepted range of human hearing.
An example of the bass driver in the Nindex project is shown below:

The upper (red) line shows the phase response of the driver, the lower (blue) line shows the impedance curve which is fairly typical of a driver in a sealed cabinet - the peak is the driver's resonance frequency when mounted in the cabinet. By analysing various elements of this trace, the "thiel-small" parameters for the driver can be derived and fed into the Exakt design tools.
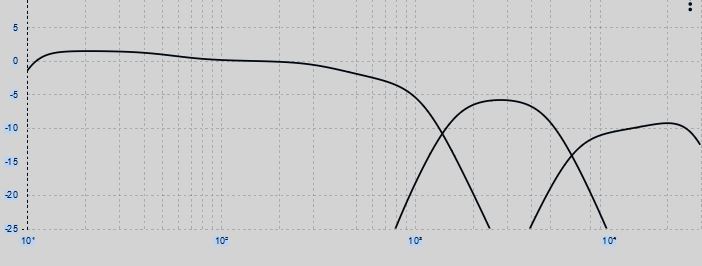
Looking at the response curves of the TM1-A array, it was a fairly straightforward choice of where to start with for the crossover points:
 |
| Mid Range Dome Frequency response - shows that the crossover points need to be above 850Hz at the lower end and below about 7500Hz at the top end (when the off-axis response starts to fall away) |
 | ||
| The tweeter has a very wide response range and looks like it could handle from 1500Hz or so upwards - so it would be a good design to use with a larger mid-bass in a two way system. |
The first acoustic measurement to take is just a quick sweep to check if the relative volumes of the drivers are somewhere near close. Using the bass driver with attenuation of 0dB I usually put in -3dB for a mid-range and -4dB as the starting point. Then work from there, usually by ear first, then refining with acoustic measurement. Its possible to hear changes of as little as 0.1dB which most people find very surprising until they hear it for themselves.
Then starts the refining of the crossover points - but only one at a time of course - listening for where the instruments sound more believeable but most importantly where the music itself is more engaging plus best for the most stable central imaging but widest overall spread of image - its not scientific, other than staying within the sensible ranges for each driver. A crossover point is a nominal value - once this seems about right, more listening is done to various combinations of each driver roll-off point and therefore which mix is right and how steep the slopes might be. For the bass to mid crossover, its easy enough to hear changes of around 25Hz in the values. For mid to tweeter, I usually work in chunks of 100Hz.
Design work was completed using a Linn Majik DSM/3 network streamer / pre-amp and a Linn Majik Exaktbox-i which combines 8 channels of Exakt processing, 8 DACs and 8 power amplifiers - a remarkable bit of kit all in one box. The Exaktbox is the pre-Katalyst DAC version (at time of writing and design work - the upgrade is planned for the future).
 |
| Linn Majik DSM/3 |
 |
| Linn Majik Exaktbox-i |
Here's the data that I ended up with for the Nindex:
Bass Driver
- Roll-on = 10Hz
- Slope Type = Butterworth
- Slope Gradient = 4th Order
- Roll-off = 1100Hz
- Slope Type = Butterworth
- Slope Gradient = 3rd Order
- Attenuation = 0dB
- Time Alignment = 0
- Roll-on = 1600Hz
- Slope Type = Butterworth
- Slope Gradient = 3rd Order
- Attenuation = 4.0dB
- Time Alignment = -119 microseconds
- Roll-off = 4800Hz
- Slope Type = Butterworth
- Slope Gradient = 3rd Order
- Roll-on = 6700Hz
- Slope Type = Butterworth
- Slope Gradient = 3rd Order
- Attenuation = 9.1dB
- Time Alignment = -87 microseconds
- Roll-off = 28000Hz
- Slope Gradient = 4th Order
 |
| The electrical outputs to achieve the crossover points |
I then, by habit, add some "protective" filters to each driver - they're not shown above, but I'll put in a low pass filter for the bass driver than allows frequencies between 0Hz and 3000Hz. For the tweeter, for example, I'll add a high pass filter from 3000Hz upwards. For example for the bass:
 |
| Example "safety" filter for the bass driver |
 |
| Mid Range Baffle Step Filter |
So now we have a pretty flat response through the design process, a choice of crossover points that give the best subjective sound and imaging. Of course, in the background of all this the Exakt system has applied the calculations to each driver to deliver minimum phase errors, but all of that is invisible to the designer.
Now its time to do some detailed acoustic measurements and iron out any signficant frequency response anomylies in the drivers themselves.
My intention with this design was to get the 30 degrees off-axis frequency response pretty close to flat. This will mean that on-axis the speaker will sound a little "bright" in that the treble output will be higher than the rest of the audio range. This is deliberate to allow the speaker to be pretty much optimal with just a very small amount of toe-in. Then for those who like a little more brightness or for older listeners whose hearing is starting to tail-off at the higher frequencies, a little more toe-in of the speaker will bring that change in balance.
Measurements are taken at 300mm to allow the mic to pick up the full frequency range but to minimise the effects of room reflections. Not having an anechoic chamber to work with means that measurements below about 110Hz need to be completely ignored as they are prone to standing waves in the room. Any tweaking below 110Hz is done purely by ear.
 | ||
| The camera angle makes this look more, but this is measuring 30 degrees off-axis in the horizontal |
This then gives a picture of any interesting "features" of the frequency response of the drivers themselves, and, if there are any, where the drivers are perhaps overlapping too much, or leaving a trough due to not enough overlap. Usually some quick adjustments to crossover points or possibly slopes get this sorted quickly. The "features" of the drivers can be adjusted for with the Exakt digital crossover designs.
This is done by "modelling" the humps and dips in the response curve, then Exakt compensates electrically by applying the inverse to the signal delivered to the speaker. So a 3dB hump at 1000Hz in the speaker will have an exact opposite - 3dB output applied at 1000kHz. It is possible to add bell curves, high or low pass and shelves. The height and width of a bell curve is adjustable. It is possible to model each left and right speaker individually, or just go with a blend of the average of both. In this project I worked on individual drivers - in commercial models it makes more sense to go with an average as there is little sense in trying to second guess the features of individual products out in the market.
So here is the resulting modelling for the left speaker with all the humps and dips modelled in for Exakt to correct for. It has to be said, apart from the need to add a lift from about 16000Hz upwards, the tweeter was the best behaved of the drivers. Please be aware that I don't spend days and days dialling out every single ripple in the response curve. It would be rather unproductive - I focus on the main features and leave it at that.
The top line is the modelling of the "features" in the frequency response of the drive units. The bottom 3 lines are the phase characteristics that Exakt has calcuated for correction. Note, at this point the features include the effect of the cabinet, not just the drive units, so some of these could be due to the cabinet resonances mentioned in the build section (Part 2).
 |
| Top is the modelling of the frequency response of the drive units, including their "features". The bottom is the Exakt modelling of the phase characteristics for correction |
RESULT
So what is the ouput of all that work?
I've used 1/12th smoothing of the acoustic measurements to give a realistic idea of the reponse curve. Below are 2 graphs to show why I'm mentioning this - if I was a speaker manufacturer, I would be tempted to publish the the 1/3th smoothing to make it look miraculously good!
Remember to ignore everything below 110Hz as there is too much room interaction.
 |
| Example with 1/3 Smoothing. Contrast With 1/12th Below. See how the above pretty much eliminates the room iteraction! And those who really like their hifi to be "objectivist" rather than "subjectivist" sometimes forget that the numbers can be manipulated. This is exactly the same data, just presented differently! |
 |
| Exactly the Same Measurement But with 1/12th Smoothing - I use 1/12th in the results below |
 |
| Green line is on-axis response measurement. Red line is 30 degrees horizontal off-axis response measurement |
Nindex phase response, 30 degrees horizontal off-axis:
 |
| Phase Response of the Nindex Project Speaker |
 |
| The dotted line in the above graph is the phase response of the £16k speaker |
So how does it sound? Well, I'm not at all disappointed by the result. In fact, its rather enjoyable. I don't think its the most dynamic speaker ever, but it does have a nice sense of flow - its definitely of the more laid back variety. If you like most JBLs, you'll not like these. Bass is tuneful but not "kicking", doesn't go massively deep but its pretty good for a box of this size. There's no real noticable box artefacts, the treble is sweet and very detailed, the mids and vocals a touch polite but well articulated. Maybe it will appeal to those who prefer the BBC type of design?
Perhaps, at the next but one Wigwam Show (plans are already in place for the next one) you'll get a chance to come along for a listen.
Now perhaps its time to hook them up to the Akurate Katalyst / Lejonklou power amps in the main system and see how they get on. Perhaps there'll be a post script later.
Finally, what's in a name. Well, not much thinking really. The base cabinet is an Index, but they're no longer Index, so they're Nindex. It works with the NINka drivers too. Kind of.
A few parting photos. Thanks for reading!



PART 1 OF 3 HERE
PART 2 OF 3 HERE












































